Design and Analysis of a Spherical Joint Mechanism for Robotic Manipulators
Por um escritor misterioso
Descrição
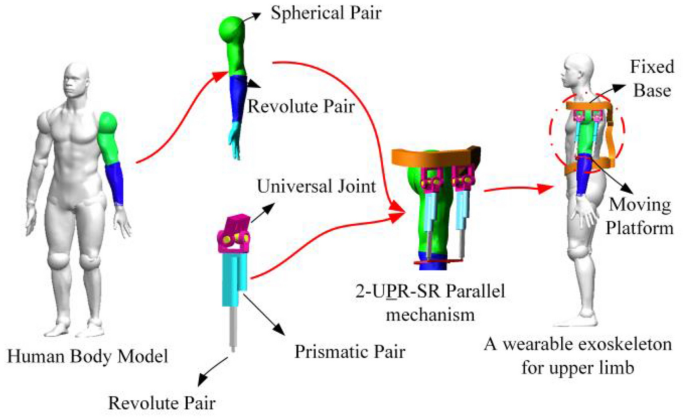
Design and Analysis of a Novel Shoulder Exoskeleton Based on a Parallel Mechanism, Chinese Journal of Mechanical Engineering

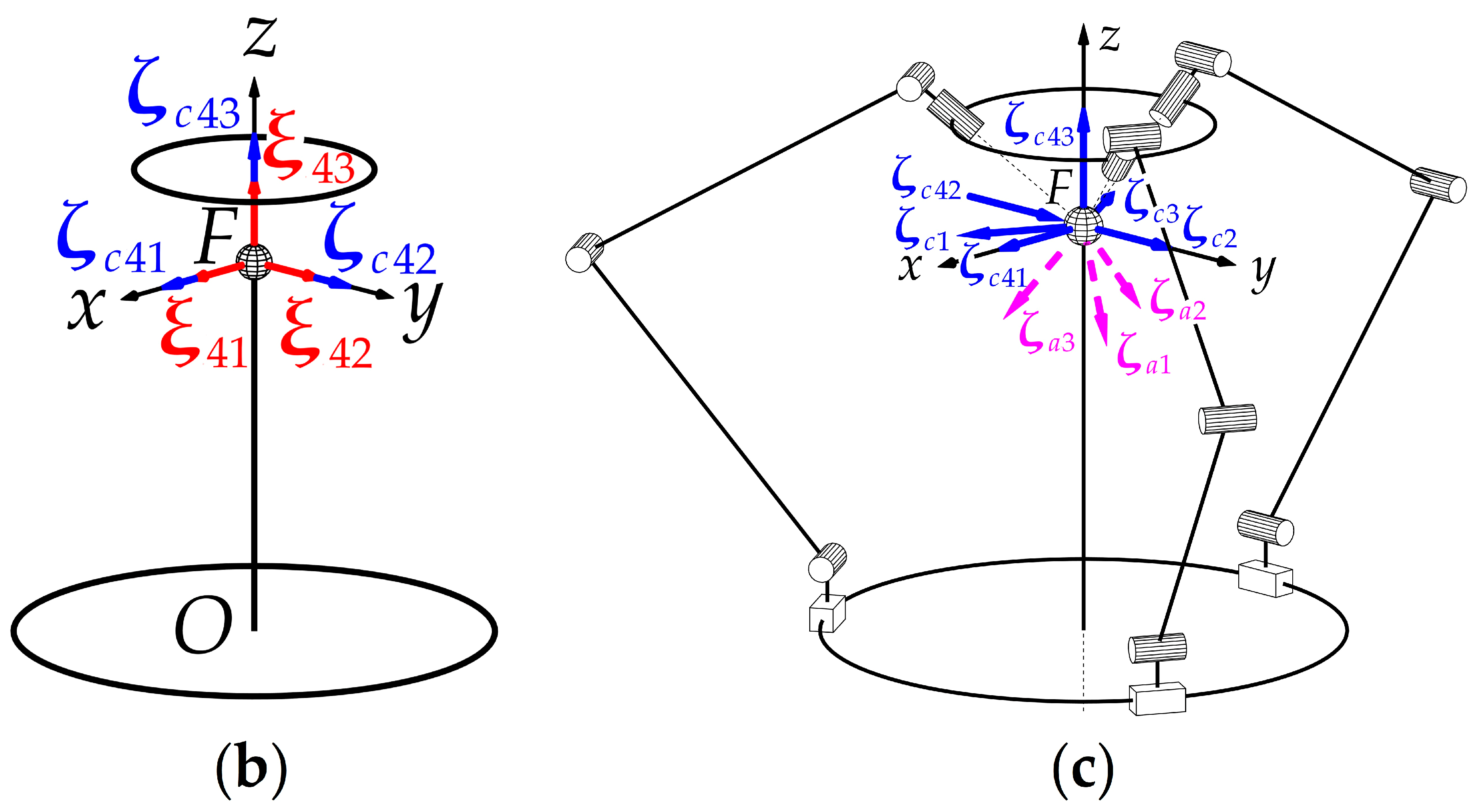
Kinematic analysis and optimal design of a novel 3-PRR spherical parallel manipulator - Soheil Zarkandi, 2021
Revolute Joint: Most Up-to-Date Encyclopedia, News & Reviews
Robotics, Free Full-Text

Working principle. (a) Initial assembled position. (b) Lock of ball joint.
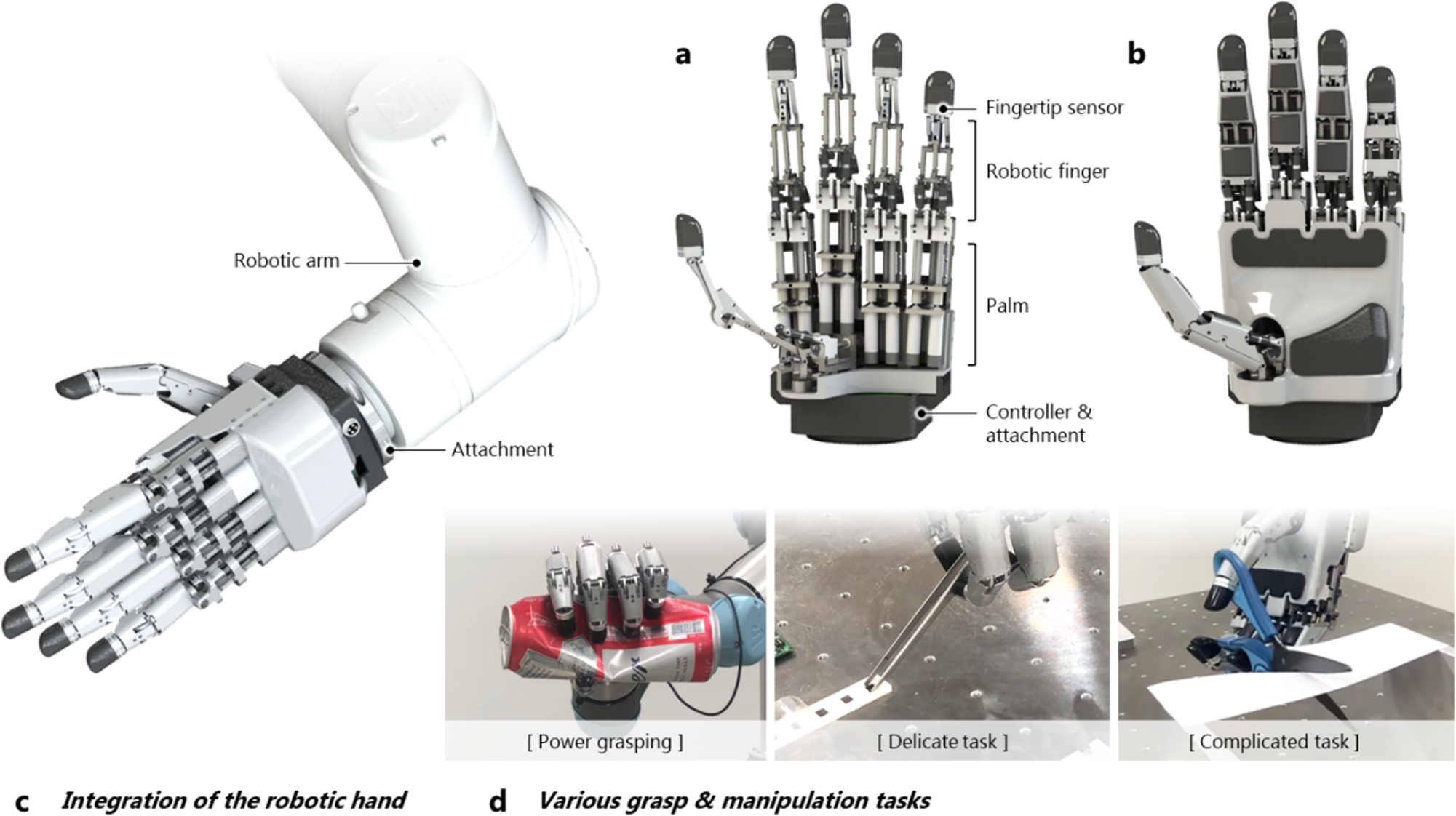
Integrated linkage-driven dexterous anthropomorphic robotic hand
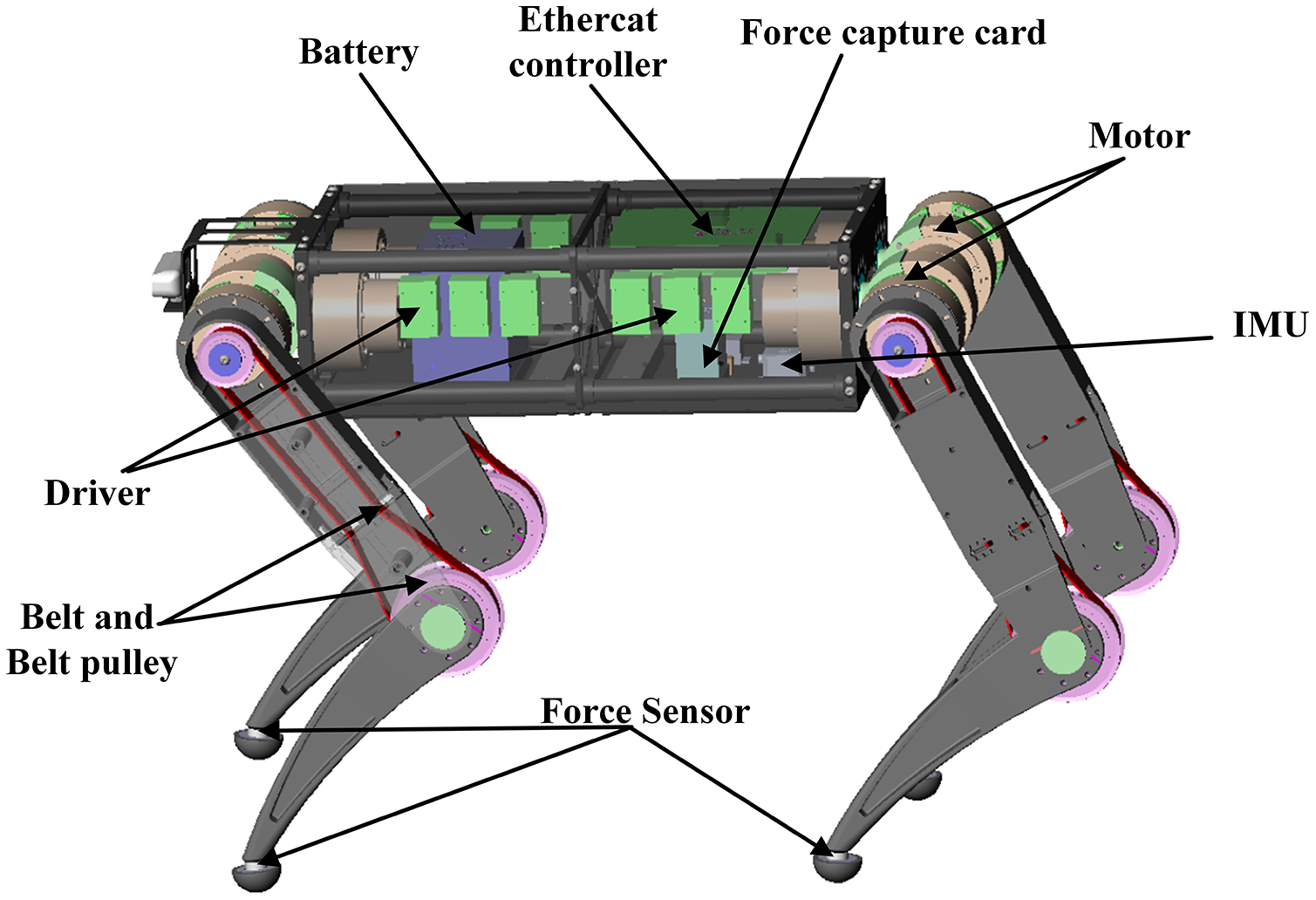
Whole-body kinematic and dynamic modeling for quadruped robot under different gaits and mechanism topologies [PeerJ]

Mechanism design and kinematic analysis of a robotic manipulator driven by joints with two degrees of freedom (DOF)

Proposal of paper format for IFToMM World Congress

Parallel manipulator - Wikipedia
de
por adulto (o preço varia de acordo com o tamanho do grupo)